I. What is adaptive PID control system?
PID stands for proportional, integral and differential control system. Adaptive PID control system refers to an intelligent PID control system with self-learning capability that adapts to changes in external conditions.
To incorporate an adaptive PID control system to TEC controller is a new research field in global electronics industry.
II. Design of the external compensation network
TEC controllers without an adaptive PID control system need an external compensation network to ensure the temperature requirements of the object. Let’s take a look at the design of the external compensation network.
As shown in Figure 1, without a compensation network, input ac sine wave signal to the TEC controller and the output signal is completely uncontrolled. Then the temperature of the object cannot be stable at the specified range.
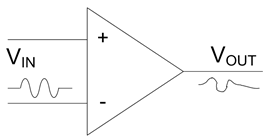
Figure 1. Without a compensation network
To make the output signal controllable and closer to the input signal, we need to add a feedback circuit between the output and the input of the controller, as shown in Figure 2. When a feedback circuit is added, the output signal is fed back to the input and compensate it. By so doing, the output signal is controlled by the input signal. Moreover, if the input signal is a sine wave, the output signal is infinitely close to this sine wave.
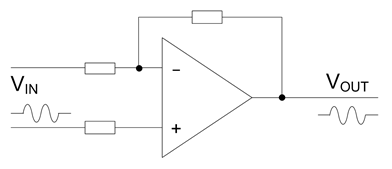
Figure 2. TEC controller with feedback circuit
However, a new problem arises, that is, the feedback takes too long. When the feedback signal is passed back to the input, the command signal will be reissued after correction. If this process takes too much time and the change at the input cannot keep up with the change at the output, then the compensation is invalid and will keep generating oscillations so that the real-time control at the output cannot be achieved.
To fix this problem, we need to add a differential circuit, as shown in Figure 3. This differential circuit can make a prediction based on the trend of the output signal, allowing the input signal to act in advance for pre-correction. In this way, the input signal no longer depends on and lags behind the feedback signal at the output, but can preempt and react quickly to control the output signal, which will be ideally controlled.
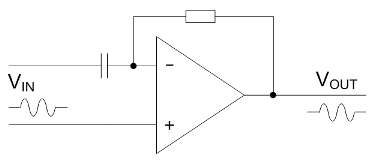
Figure 3. TEC controller with differential circuit
However, this pre-judgment process may be over-corrected and some errors may occur. To eliminate this error and make the control more accurate, we’ve added an integral circuit as shown in Figure 4. The integral circuit is used to balance the above-mentioned differential circuit, to slow down the pre-judgment action appropriately, which reduces the errors between the input signal and the output signal and increases the accuracy of the control. This makes the output signal infinitely close to the input signal, so that the TEC controller can control the load with high accuracy.
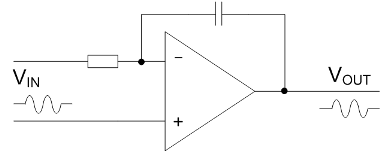
Figure 4. TEC controller with integral circuit
Given all that, all the circuits form the compensation network of the TEC controller, as shown in Figure 5. In the process of debugging the compensation network, RP, CI, RD and CD complement and interact with each other. When the RP is in the best position, and then adjust the CI or RD or CD, the RP will change, and so will several other parameters. Therefore, the debugging process is tedious and long. For a "novice" engineer in his/her first debugging process, it may take a few weeks, a month or even longer. Even for an experienced engineer, it may take a few days to a week to set up suitable compensation network parameters for the controller to work in the best condition.
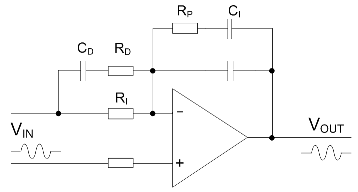
Figure 5. TEC controller with compensation network
III. Design of adaptive PID control system
To simplify the debugging process of the compensation network, the adaptive PID control system is created, which integrates the above compensation network circuit functions into a single chip as shown in Figure 6. By programming and controlling the single chip, the adaptive PID control system can quickly match a set of optimal parameters by "learning" for different loads and environments to replace the compensation network. This self-learning process may take only a few minutes, saving a lot of time and labor costs and improving the efficiency. If the load or the environment changes, it just need to "learn" again.
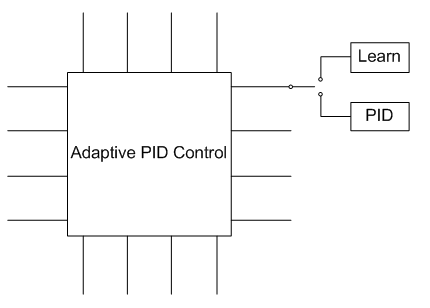
Figure 6. Diagram for adaptive PID control
Adaptive PID is generally divided into open-loop adaptation, closed-loop adaptation, and relay adaptation. We will focus on the closed-loop adaptation.
As shown in Figure 7, a KC signal oscillates an unsaturated sine wave. Measure the period T of the sine wave and find KP, KI and KD from KC and T. The equations are as follows.
KP = 0.60KC
KI = 2KP/T
KD = KPT/8
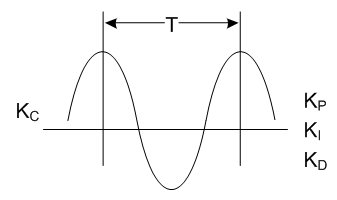
Figure 7 Closed-loop adaptation waveform
Figure 8 is the block diagram for adaptive PID control. When the switch K1 is connected to "Learn", the controller will automatically match the parameters according to the load and the environment. When the learning is completed, just turn K1 to "PID" and the controller will work well. If the parameters are not right or the load and the environment change, just "learn" again.
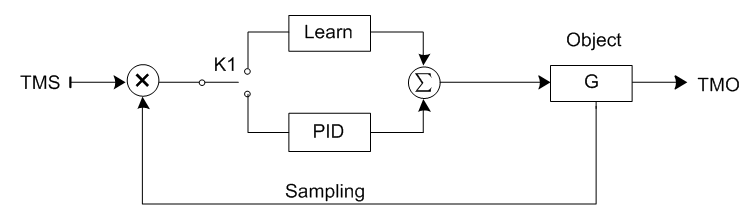
Figure 8. Block diagram for adaptive PID control
IV. Advantages of Adaptive PID Control System
Analog Technologies has integrated the adaptive PID control into the TEC controller. TEC28V15ADAPID is such a TEC controller with built-in adaptive PID control, as shown in Figure 9.
Adaptive PID control system can completely replace compensation networks and, through self-learning, it can re-match parameters to changes in load and ambient temperature.

Figure 9. TEC controller with built-in adaptive PID control
Figure 10 shows the waveform of the TEC controller TEC28V15AD with a manually adjusted temperature compensation network (VTMO) and the waveform of the TEC controller TEC28V15ADAPID with a built-in adaptive PID control system (VTMS).
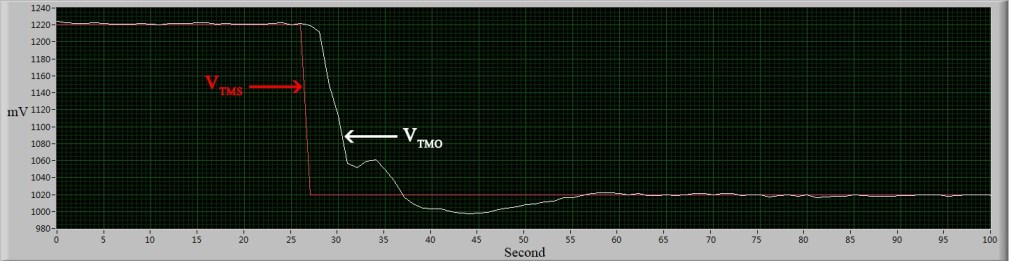
Figure 10. Waveforms comparison
TEC controllers with built-in adaptive PID control have the following advantages.
1. Saving time for designing and adjusting compensation network.
2. Saving PCB space for external compensation networks.
3. Do not need a professional engineer to operate.
4. Reducing the costs for components, labor and time.
Therefore, our TEC controller with PID control can be applied to more projects.
For more technical info:
https://www.analogtechnologies.com/TEC_controller_TEC28V15A.html
https://www.analogtechnologies.com/TEC_Controller_TEC28V15A_series.html
For other TEC controllers: http://www.analogtechnologies.com/tec-controller.html
Here is our homepage: http://www.analogtechnologies.com/